차량 내 네트워크(IVN)는 최신 자동차 기능의 근간을 형성합니다. 첨단 운전자 지원 시스템(advanced driver assistance systems, ADAS), 인포테인먼트 시스템, 카메라, 차량 간 통신 시스템과 같은 고급 기능에 필요한 데이터의 흐름을 촉진할 뿐만 아니라 전파를 위한 레이더와 빛을 감지하는 liDAR를 포괄하는 원격 감지 기술도 지원합니다.
10Base-T1S란?
이렇게 서로 다른 여러 자동차 부품을 조정하는 것은 매우 어려운 일이며, 모든 단일 부품이 다양한 시장의 규정 준수 표준을 충족하는지 확인하는 것은 더욱 어렵습니다. 10BASE-T1S 오토모티브 이더넷 네트워킹 기술은 자동차와 같이 소음이 심하고 전자파가 심한 환경에서 10Mbps의 속도로 데이터를 전송하도록 특별히 설계된 연선 케이블을 통해 이러한 문제를 완화하는 것을 목표로 합니다.
10BASE-T1S라는 이름은 4쌍의 와이어를 사용하는 기존 이더넷 기술과 달리 싱글 페어 환경에서 베이스밴드 신호를 사용하여 단일 채널을 통해 데이터 전송을 용이하게 하는 방법을 설명하기 위해 사용됩니다.
물론 10BASE-T1S의 도입은 자동차 제조업체가 CAN/CAN-FD 이후에 적응해야 할 새로운 표준이 생겼음을 의미합니다. 다행히 로데슈바르츠의 기술 매니저인 Curtis Donahue와 GRL의 글로벌 오토모티브 디렉터인 Rainer Eckelt가 10base-T1S 규정 준수에 대해 알아야 할 모든 것을 이 문서에 정리 했습니다.
자동차 이더넷 및 자율주행 자동차
Automotive space 는 자동차가 더욱 자율적이고 상호 연결됨에 따라 점점 더 소프트웨어로 정의되고 있습니다. 전문가들은 2030년까지 자동차가 '레벨 5 자율성'을 달성할 것이라고 예측합니다. 여기서 승객은 자신의 눈이나 손을 사용하는 대신 자동차 시스템에 전적으로 의존하여 주변을 모니터링할 수 있습니다.
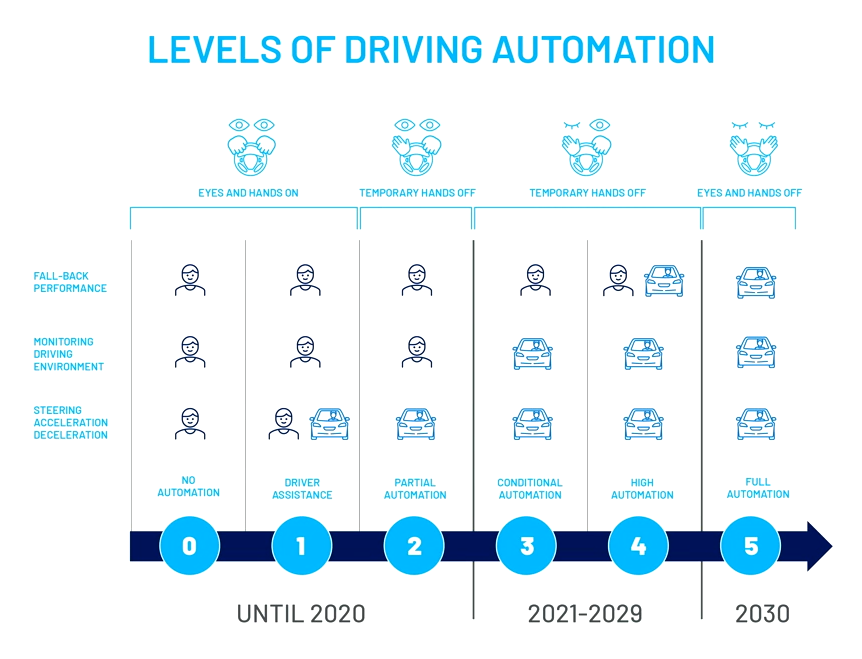
레벨 1의 비자동화(No Automation)부터 레벨 5의 완전 자동화(Full Automation)까지의 운전 자동화 수준
모던 IVN 아키텍처
물론 이러한 시스템 아키텍처를 달성하려면 제조업체는 사실상 완벽한 모니터링 및 폴백 시스템을 설계해야 합니다. 불가능하게 들리겠지만, 자동차 산업은 전통적인 차량에서 오늘날의 ACES 정의 차량(Automated, Connected, Electric, and Shared)에 이르기까지 먼 길을 걸어왔습니다. 최신 차량의 IVN은 이미 복잡한 센서에서 들어오는 데이터를 보호하고 전송하는 데 필요한 더 높은 수준의 컴퓨팅 성능과 데이터 처리량을 갖추고 있습니다. 동시에 IVN의 하드웨어도 정교화되어 전력 소비와 무게 효율성을 최적화하고 있습니다.
IVN 아키텍처에서 크게 개선된 한 가지 측면은 독립적인 전기 제어 장치(Electric Control Units, ECU)로 더 적은 수의 도메인 컨트롤러가 단일 도메인을 담당하는 도메인 중앙집중형 형식으로 전환되고 있으며, 이 형식은 더 작은 수의 검열기와 ECU로 구성됩니다. 도메인 중앙 집중식 설계는 이미 자동차가 조향, 가속, 주변 환경 모니터링을 시스템이 대신하는 레벨 3 자율성을 달성하는 데 도움이 되었으며, 운전자는 편안히 앉아 관찰할 수 있습니다.
10BASE-T1S가 탄생한 이유
10BASE-T1S에 대한 첫 개념 증명은 2000년대 초반부터 2010년까지 이루어졌으며, 이때 100 BaseTX가 수많은 버스 및 스위치 액세서리와 함께 출시되었습니다. 100 Base-TX는 제조업체들이 차량 내 환경에 USB 포트와 인포테인먼트 시스템을 통합한 최초의 사례입니다. 그 이후로 차량용 이더넷은 점점 더 복잡해지는 자동차 생태계에서 더 높은 비트 전송률과 더 낮은 비트 전송률을 도입하여 차량 내 시스템의 네트워킹 측면을 대부분 차지하게 되었습니다.
자율주행차 시장 잠재력
기술이 발전함에 따라 소비자의 인식과 수요가 증가하고 있습니다. 오늘날 자동차 고객 중 절반 이상(64%)이 더 나은 자율 주행 기능을 위해 OEM으로 전환할 의향이 있다고 밝혔습니다. 비슷한 비율의 미국 고객(66%)이 공유 모빌리티와 키가 필요 없는 차량 진입을 기본 기준으로 삼고 있습니다. 2030년까지 판매되는 신차의 95%가 상호 연결될 것으로 예상되며, 유럽에서 판매되는 전기 자동차는 53%를 차지할 것으로 예상됩니다.
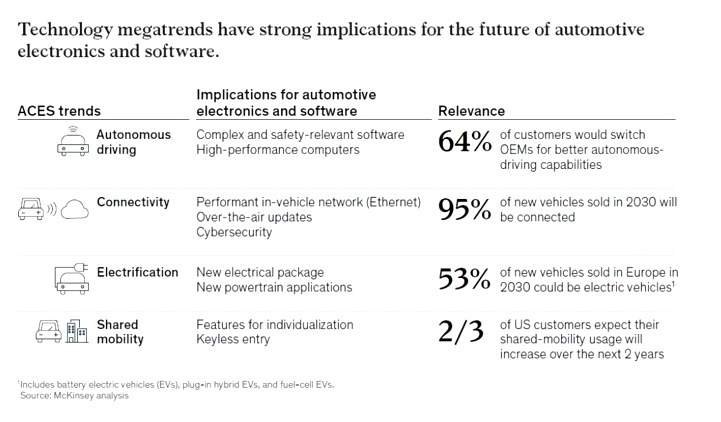
자동차 메가 트렌드
출처 : McKinsey analysis
10BASE-T1의 기술 개요
2019년에 비준된 10BASE-T1S는 IEEE 산하의 최신 자동차 사양 중 하나입니다. 가장 빠른 사양은 아니지만 10BASE-T1S는 제조업체가 속도, 비용, 시스템 시너지 사이의 균형을 맞추는 데 도움이 됩니다.
다른 차량용 사양은 PAM(Pulse Amplitude Modification) 신호를 사용하는 반면, 10BASE-T1S는 DME(Differential Manchester Encoding)를 사용하여 복잡성과 비용을 절감합니다. 또한 10BASE-T1S는 지점 간 및 멀티드롭을 지원하므로 CAN에서 알려진 표준 스위치 토폴로지 또는 단일 버스를 사용할 수 있습니다. 멀티드롭 기능은 최대 25미터 길이의 채널과 최대 8개의 노드를 지원할 수 있는 채널에 적용할 수 있습니다. 즉, 10Base-T1S에는 IEEE 차량용 사양 중에서는 다소 생소한 멀티드롭 기능을 용이하게 하기 위해 PLCA라는 조정 하위 기능이 포함되어 있습니다.
PAM vs DME
10BASE-T1S DME 시그널링의 주요 장점 중 하나는 PAM에 비해 비용이 훨씬 저렴하다는 것입니다. 0과 1 레벨 사이의 DME 전환은 PAM보다 훨씬 더 자주 발생하므로 클럭 복구 속도가 빨라지고 결과적으로 제품 비용이 저렴해집니다.
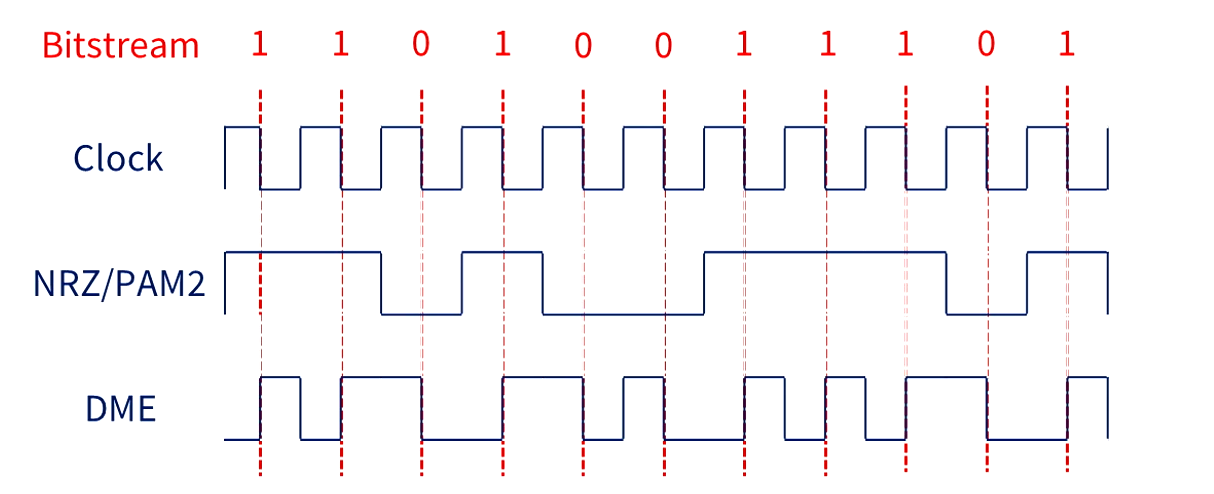
DME와 NRZ/PAM2 사이의 0과 1 레벨 사이의 전환 빈도를 보여주는 샘플 비트스트림
Multidrop topology
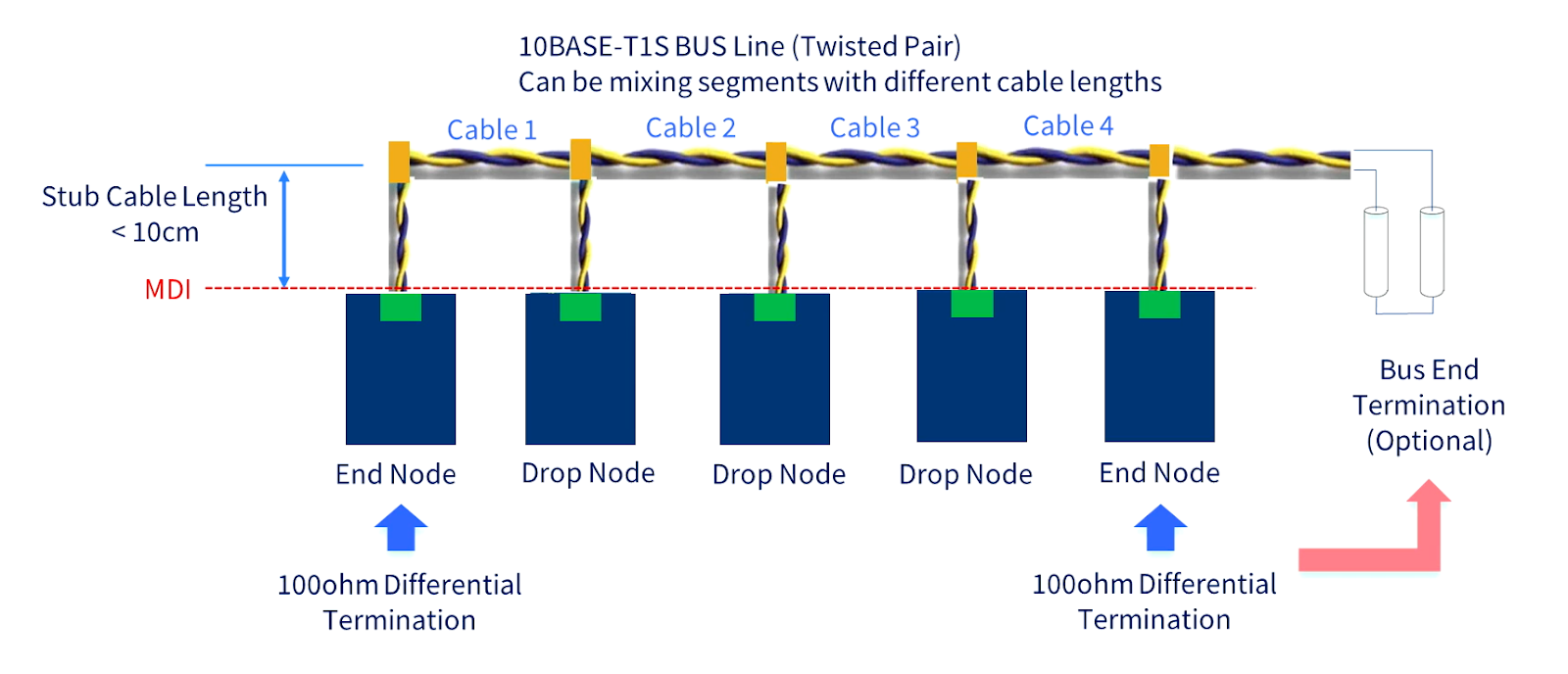
10BASE-T1S에는 여러 장치를 동일한 채널에 연결할 수 있는 믹싱 세그먼트가 있습니다. 엔드 노드 디바이스(100Ω)와 드롭 노드(50Ω) 사이의 차동 저항은 디바이스들이 매우 가까운 타이밍에 동일한 채널을 통해 통신할 수 있게 해줍니다.
다른 설정으로는 100Ω 터미널 엔드 노드와 단일 100Ω 케이블 대신 임피던스 종단을 사용하여 동일한 효과를 얻을 수 있습니다.
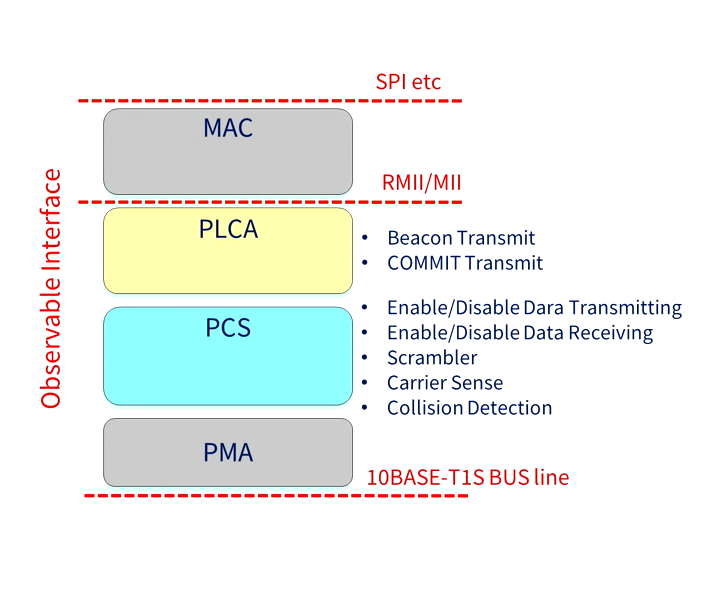
물리 계층 충돌 방지 (Physical layer collision avoidance , PLCA)
기존 이더넷은 주로 단일 MAC-Phy 통신을 정의하는 주로 지점 간 아키텍처이기 때문에 최신 10BASE-T1S는 조정 하위 계층이 PCS와 MAC 사이를 이동해야 하는 사전 정의된 MAC을 사용하면서 멀티드롭 모드에서 버스 통신도 지원합니다. 이를 통해 각 디바이스는 비콘(beacon)을 전송할 수 있으며, 이 비콘은 디바이스 전송 순서를 결정하고 궁극적으로 충돌을 방지하는 데 사용됩니다.
10BASE T1-S의 애플리케이션 및 사용 사례
10BASE T1S vs 100/1000 BaseT1 vs 레거시 IVN 비교
10BASE-T1S는 100/1000 Base-T1과 레거시 IVN 사이의 골디락스 표준으로도 알려져 있습니다. 이는 비용을 낮게 유지하면서 이전 버전의 레거시 네트워크보다 빠른 데이터 속도를 촉진하는 멀티드롭 아키텍처를 지원합니다. 그러나 CAN-FD와 CAN XL도 각각 8MBit와 20MBit의 속도에 도달했다는 점에 유의해야 합니다.
이에 비해 100/1000 Base-T1과 같은 이전 자동차 기술은 훨씬 더 높은 대역폭의 PAM 신호와 스위치 구현 센서 및 활성화기를 사용하여 고성능이면서도 비용이 많이 들었습니다. 반면, CAN, CAN FD, Flexray와 같은 레거시 IVN은 가격이 저렴하면서도 데이터 속도가 낮았으며 나중에 이더넷에 채택된 멀티드롭 아키텍처를 특징으로 했습니다. CAN과 최신 이더넷 버전의 주요 차이점은 전자는 BUS 중재를 위해 addr/prio를 사용한 반면 후자는 정밀한 시간 슬롯을 위해 정의된 "비콘(beacon)"을 사용했다는 점입니다.
Zonal architecture

영역 아키텍처(Zonal architecture)는 SoC(System on a Chip) 장치에 대한 고속 업링크가 있는 영역 스마트 스위치 또는 여러 SoC를 연결하는 고속 스위치로 구성됩니다. 거기에서 100/1000 Base-T1 고속 센서 및 액추에이터뿐만 아니라 저속 센서 및 장치용 10BASE-T1S에 대한 지점 간 연결이 있습니다. 레거시 하위 네트워크와 달리 모든 통신은 이더넷(TCP/IP, SOME/IP)을 기반으로 하므로 SDV를 더 쉽게 확장할 수 있습니다.
10BASE-T1S 컴플라이언스 테스트 사양
규정 준수과 안정성을 보장하려면 먼저 10BASE-T1S를 테스트하는 방법을 파악하는 것이 중요합니다. 이를 위해서는 엔지니어가 정의된 환경 내에서 여러 테스트 스테이션에 걸쳐 확장 가능하고 재현 가능한 방식으로 멀티드롭 기술을 복제해야 합니다.
PMA 테스트 사양
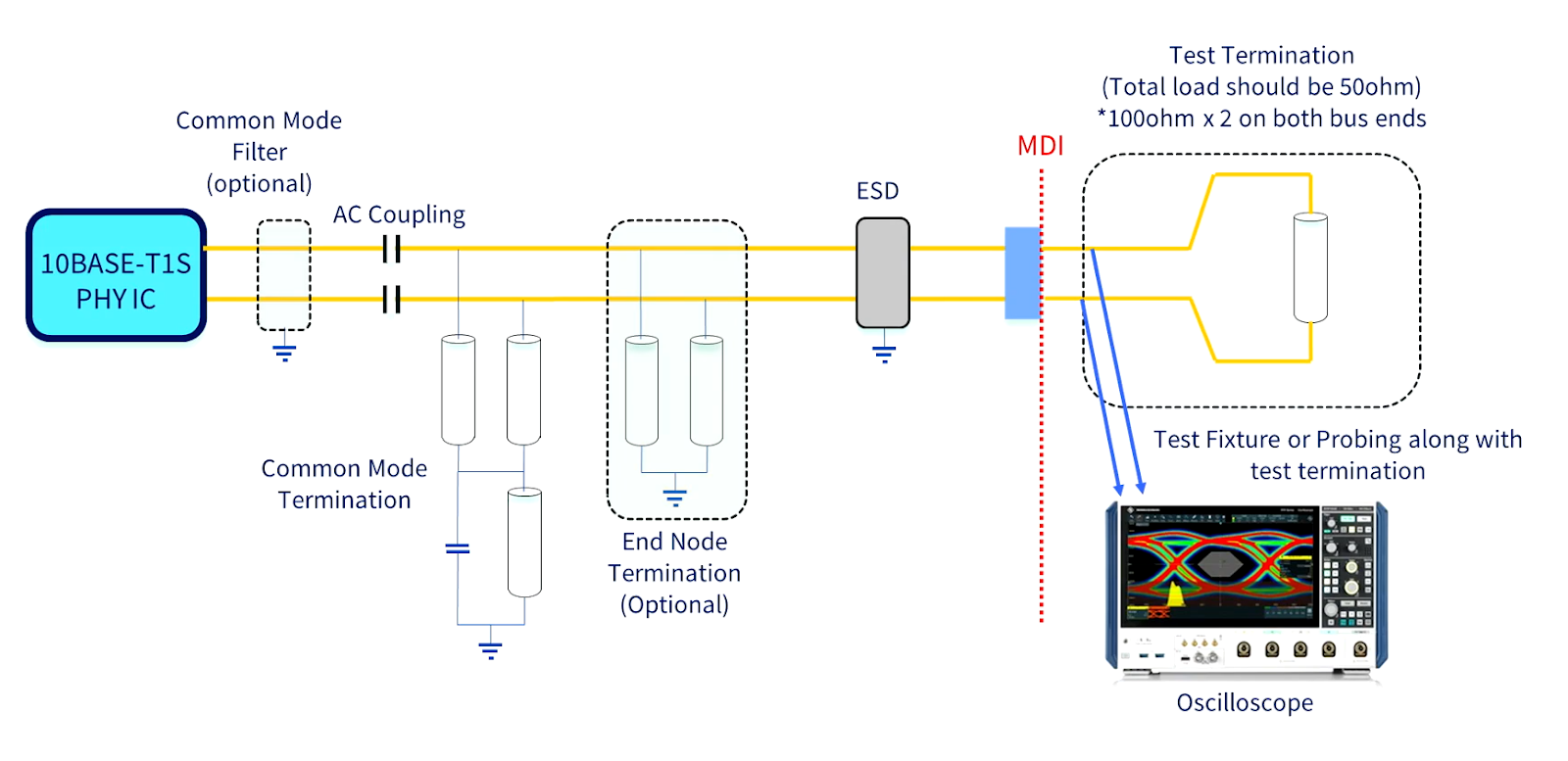
다음 이미지는 BUS의 설정을 보여줍니다. 멀티드롭 및 BUS 세그먼트는 많은 소음을 발생시켜 테스트가 복잡해집니다. TC 14 그룹과 함께 GRL은 BUS 장치를 단일 설정으로 제한하는 동시에 실제 BUS에서 동일한 환경을 재현할 수 있는 링잉 회로 기판을 개발했습니다.
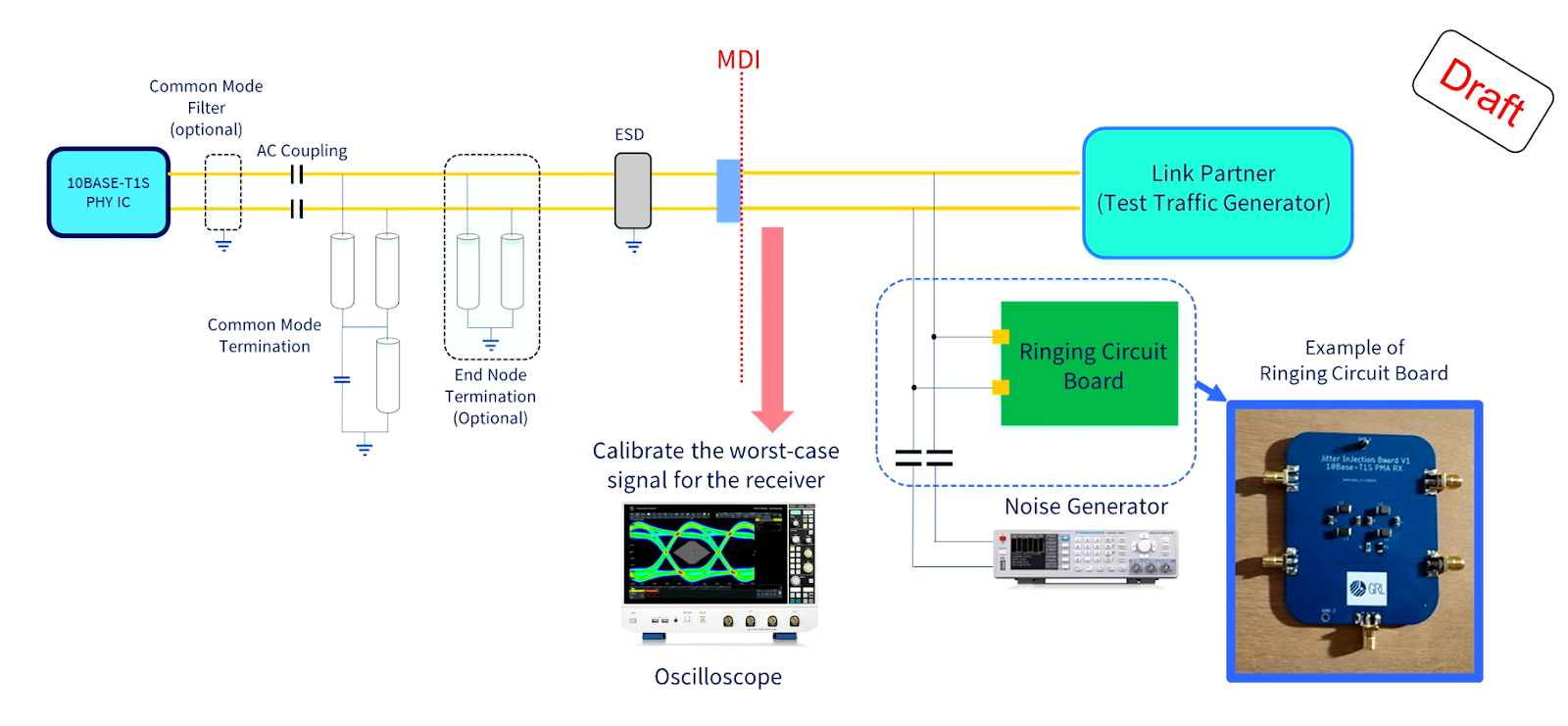
한 단계 더 나아가 실제 BUS 시나리오를 에뮬레이션하기 위해 GRL은 TC 14 팀과 긴밀히 협력하여 오실로스코프에서 가장 정확한 교정 설정 및 매개 변수를 파악해 왔습니다. 자세한 내용은 웨비나 데모를 통해 확인하실 수 있습니다.

PMA RX 캘리브레이션
스트레스 신호가 에뮬레이션되는 RX 측에서는 BUS 설정, 링잉 보드 및 주파수 생성기가 다양한 수준의 지터를 생성할 수 있는 가능성을 제공합니다. 이를 통해 정의된 신호의 노이즈 진폭이 증가할 때 BUS가 어떻게 작동하는지 확인할 수 있습니다.
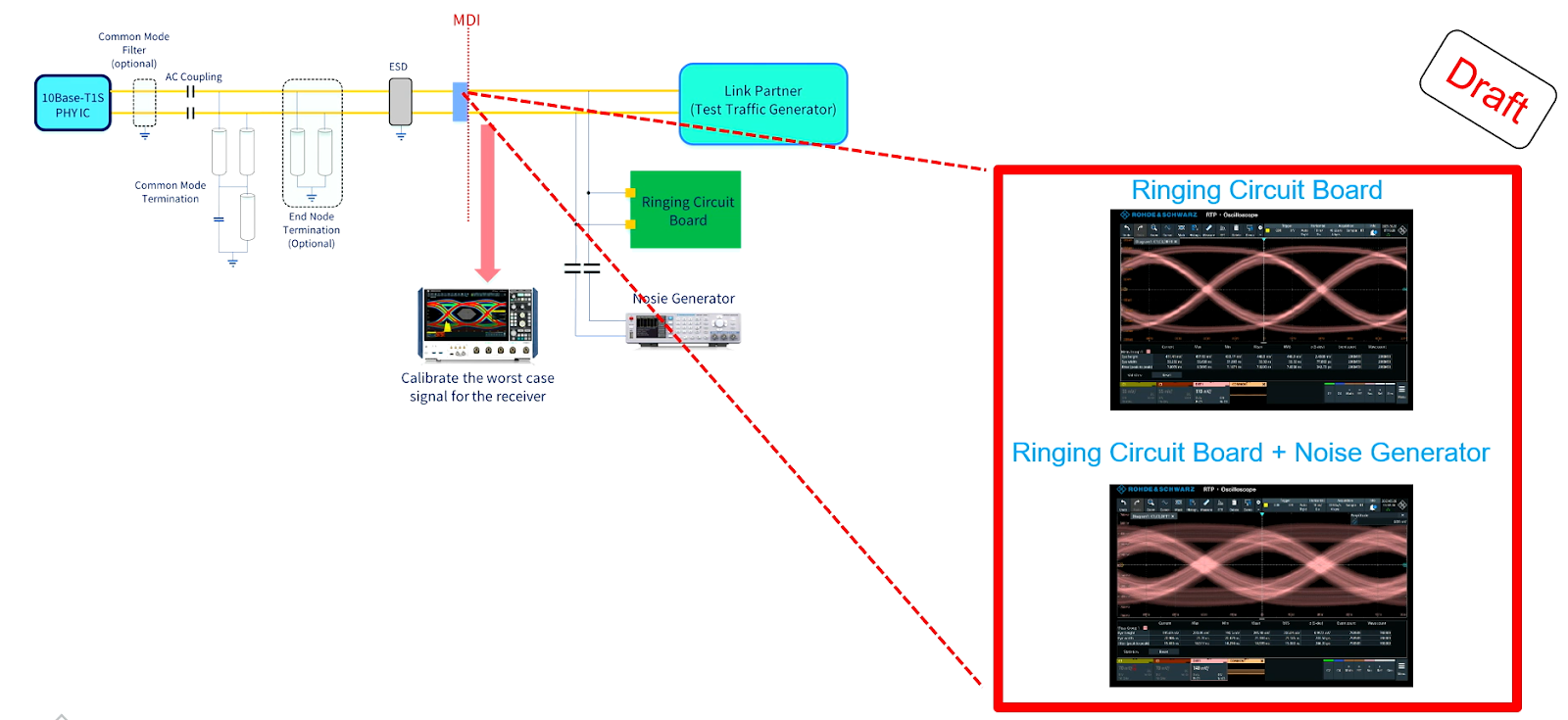
일반적으로 링크 파트너는 테스트 모드 3에서 사용되며 신호 잡음 진폭을 변경하면 지터가 어떻게 영향을 받는지 보여줍니다. 최종 값, 측정 흐름 및 규정 준수 검증은 OPEN Alliance TC14에서 진행됩니다.
PCS/PLCA test specification
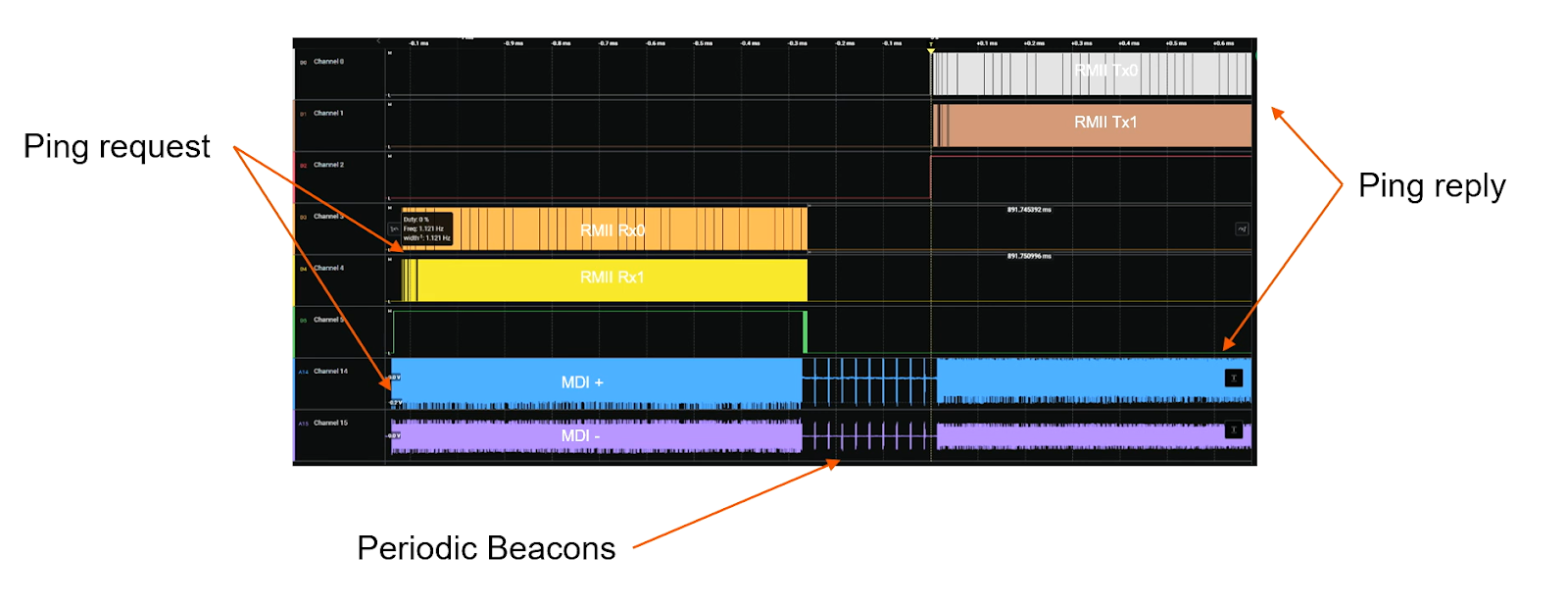
PCS/PLCA 테스트 사양은 디지털 측에서 일부 데이터를 전송하는 SoC의 방법 단계에서 인코딩 및 전송에 영향을 미치는 Phy의 중간 부분을 다룹니다. 위에서 설명한 것처럼 10Base-T1S는 100/1000Base-T1에 비해 두 가지 레이어를 지원합니다. PCS 레이어만 인코딩하여 프런트엔드로 전송하는 표준 Base-T1에서 PLCA 레이어는 정의된 전송을 위해 각 노드의 트래픽 창에 대한 비콘을 생성하는 10BASE-T1S의 BUS 인터페이스를 활성화합니다.
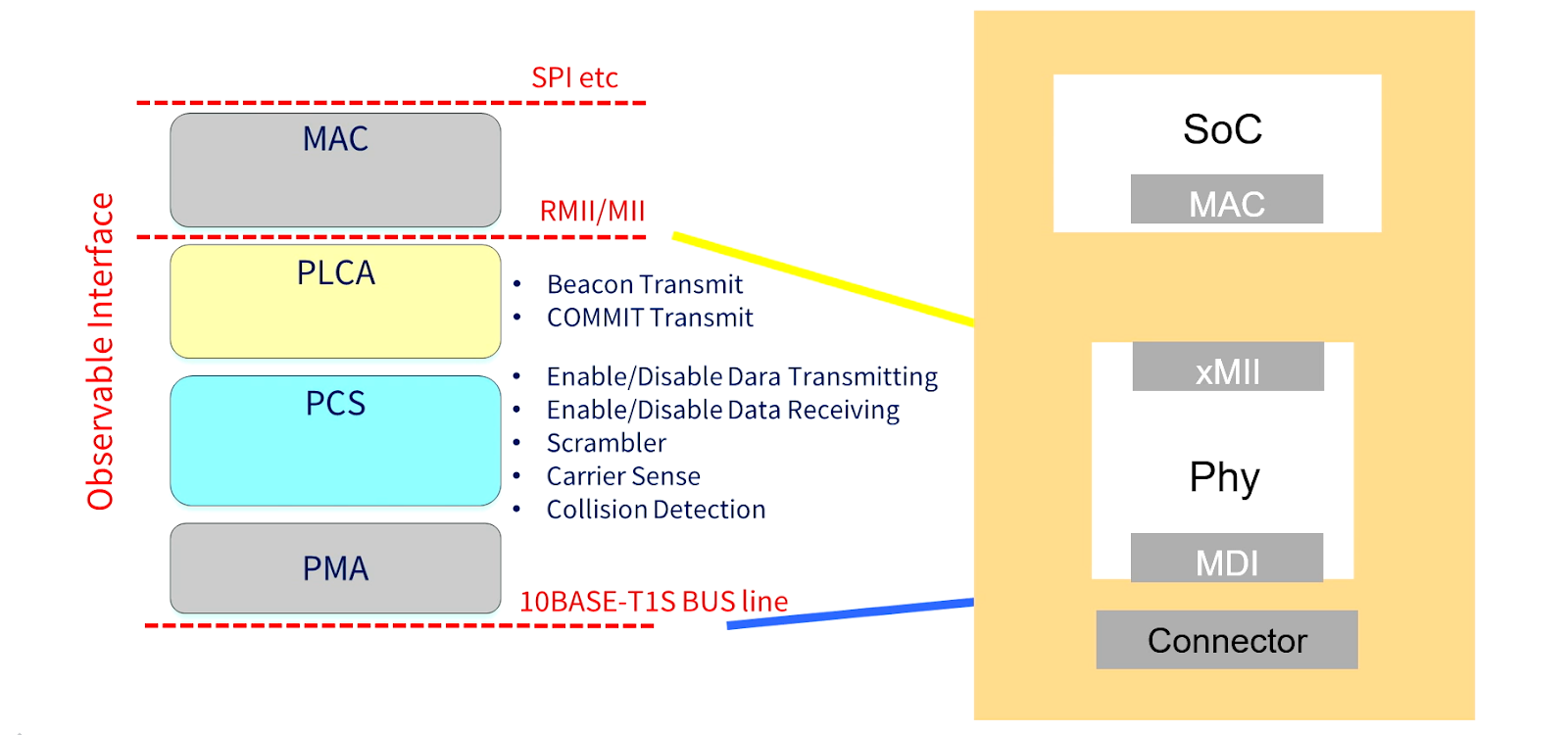
핑 요청의 예를 들면, MDI는 물리적 측면에서 데이터가 들어오는 위치를 나타냅니다. 그런 다음 신호가 반대쪽의 RMII 인터페이스로 이동할 때까지 짧은 지연이 발생합니다.
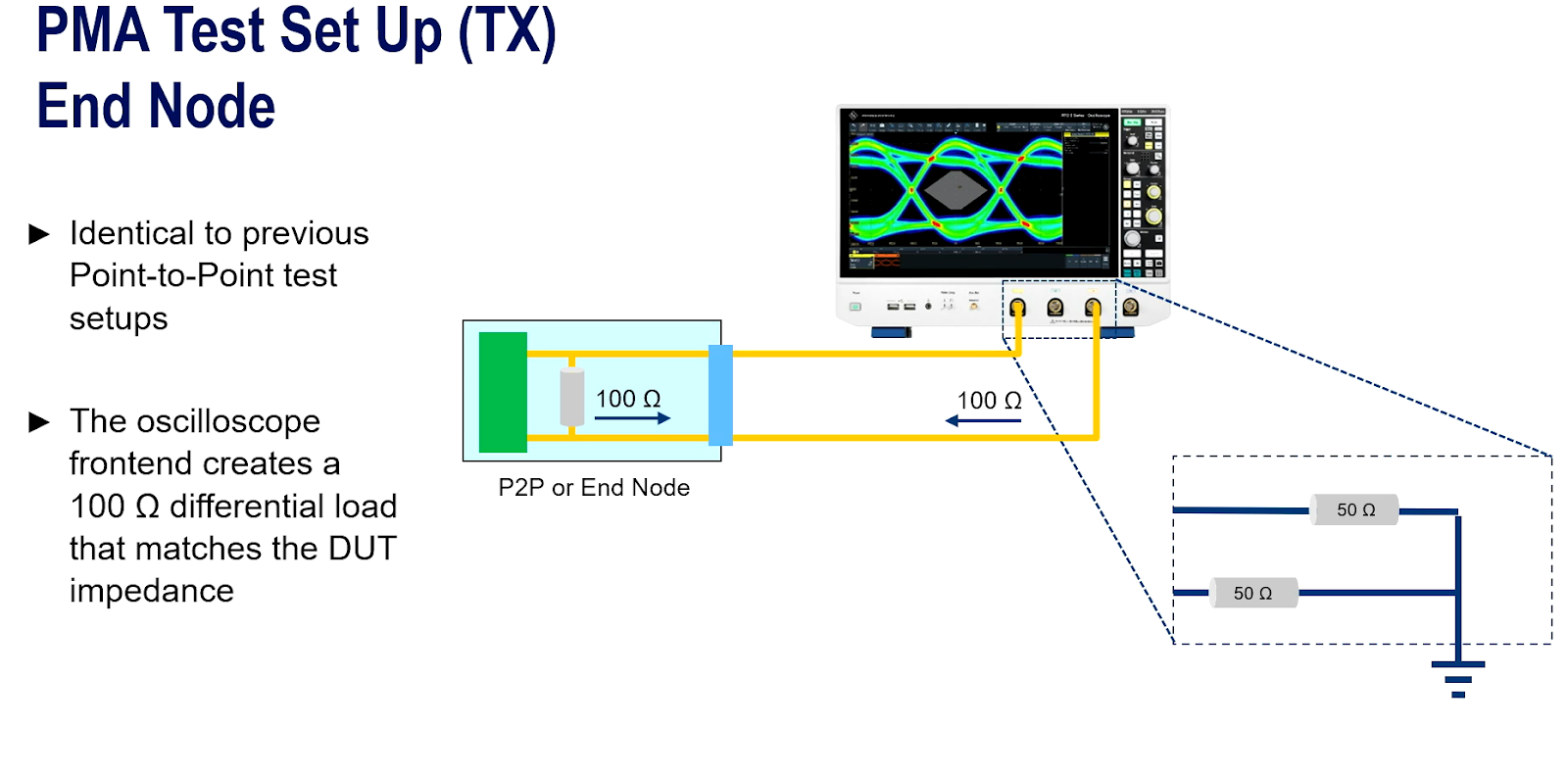
PMA 테스트 설정(TX)
이는 100/1000 Base-T1 및 포인트 투 포인트를 지원하는 기타 이더넷 기술에서 수행된 방식과 동일합니다.
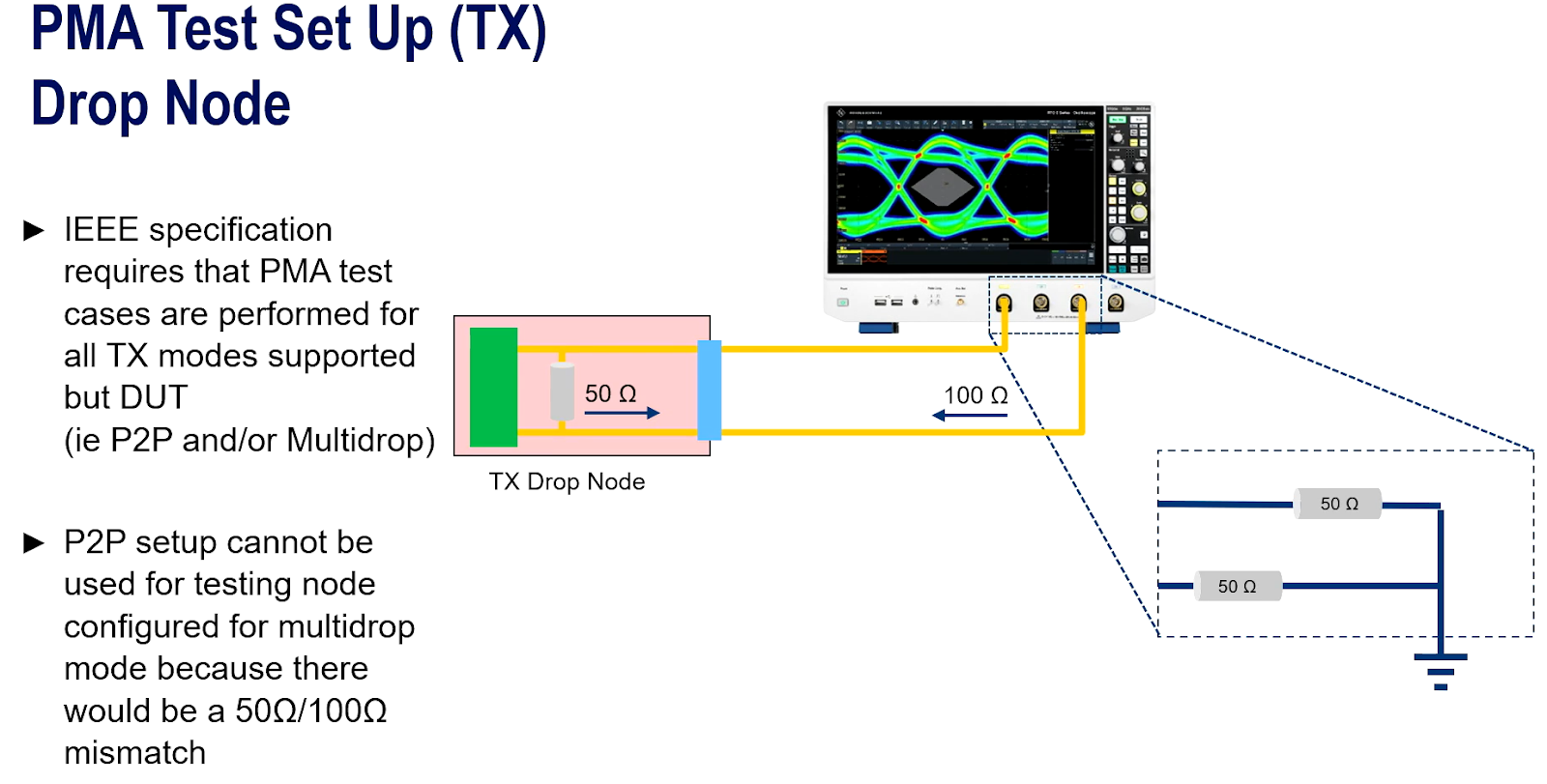
포인트 투 포인트 디바이스를 드롭 노드로 교체하면 테스트 설정에서 50Ω과 100Ω 사이의 불일치가 발생합니다. 이는 두 구성 모두에 대해 측정해야 하는 PMA 테스트 사례를 요구하는 IEEE 사양에 위배됩니다.
그렇다면 50Ω 디바이스의 특성을 어떻게 측정할 수 있을까요? 멀티드롭 예제에서 포인트 투 포인트 엔드 노드와 전송 드롭 노드는 오실로스코프에서 링크의 반대쪽 끝에 100Ω의 라인 종단을 생성합니다. 이 100Ω은 실제로 드롭 노드 또는 테스트 중인 디바이스가 있는 오실로스코프와 병렬로 연결됩니다.
여기에는 테스트 픽스처에서 구현할 수 있는 지터와 진폭이 포함되며, 추가 임피던스에 대한 PCB 조언에 하드웨어 수정 옵션을 추가할 수도 있습니다.

Drive connected and compliant cars into new markets
GRL은 10/100/1000 Base-T1S에 대한 포괄적인 차량용 이더넷 테스트 서비스를 제공하여 필요한 IC 공급업체 및 Tier 1 공급업체와 연결해 줍니다. 효율적인 인증절차를 진행합니다. 여기에서 10BASE-T1S 데모의 나머지 부분을 시청하거나 맞춤형 데모를 예약하세요 .
About the author
Rainer Eckelt는 오토모티브 이더넷, PCIe, SerDes 및 USB와 같은 고속 인터페이스를 위한 GRL의 테스트 서비스 및 솔루션 확장에 중점을 두고 있습니다. 그는 이전에 NXP의 현장 애플리케이션 엔지니어, FibreCode GmbH의 총책임자, SMSC/Microchip의 MOST Tool-Portfolio 이사로 근무했습니다.


.png)